

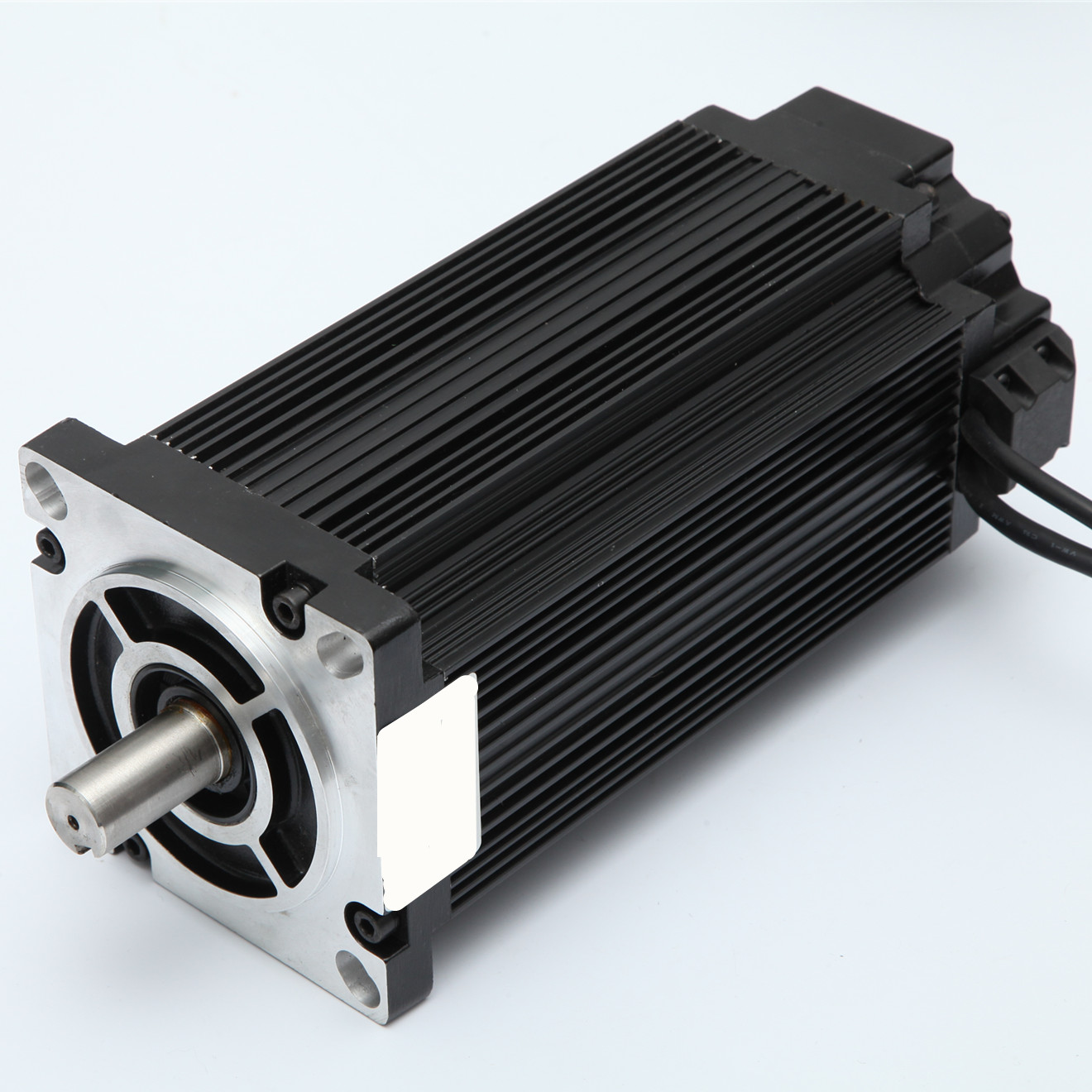
display digitale ad alta tensione motore passo-passo 220V Nema42 ad anello chiuso 12Nm
Serie NEMA42 Easy Servo (serie NEMA42 ad anello chiuso)
Parametri elettrici del motore:
| Modalità | Angolo del passo | Corrente (A) | Resistenza (Ω±10%) | Induttanza (mH±20%) | Coppia di mantenimento (Nm) | Lunghezza del motore (mm) | Codificatore Risoluzione (PPR) | Driver applicabile |
| 110HCE12N-B39 | 1,2° | 4.2 | 1.2 | 13 | 12 | 139 | 1000 | 3HSS2260 |
| 110HCE20N-B39 | 1,2° | 4.2 | 1,88 | 18 | 20 | 221 | 1000 | 3HSS2260 |
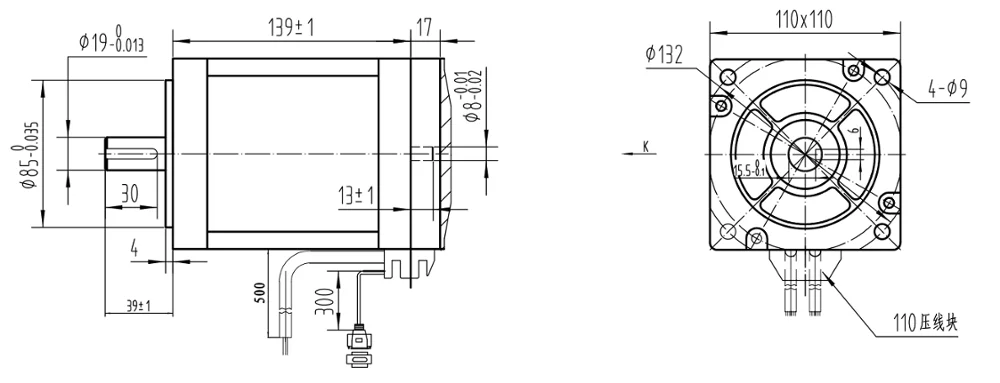
Dimensione motore:mm
Curva coppia/frequenza
Autista 3HSS2260
Caratteristiche
1, DSP a 32 bit e tecnologia di controllo vettoriale ad anello chiuso
2, senza perdere passo, alta precisione nella posizione
3, migliorano la coppia di uscita del motore e la velocità di lavoro
4, tecnologia di controllo della corrente variabile, limitano l'aumento della temperatura del motore
5, adattamento a una varietà di condizioni di carico meccanico (comprese le pulegge a bassa rigidità), no
è necessario regolare il parametro del guadagno
6, movimento fluido e affidabile, vibrazioni ridotte, grande miglioramento nell'accelerazione e
decelerare
7, la capacità di velocità zero statica senza vibrazioni
8, adattarsi al servomotore ibrido trifase 86 (NEMA34) e 110 (NEMA 42)
9, frequenza massima dell'impulso passo-passo 200 KHZ
10, Micro passo 400-60000 impulsi/giro
11, gamma di tensione AC150-240V
12, protezione da sovracorrente, sovratensione e sovraposizione
13, display a sei tubi digitali, parametri facili da impostare e monitorare il funzionamento del motore
stato
Selezione micropasso:
| Codice | Definizione | Allineare | Valore di default | Osservazione |
| PA0 | Numero della versione | 501 | Vietato modificare | |
| PA1 | Selezione della modalità di controllo | 0~2 | 0 | |
| PA2 | Selezione del tipo di motore | 0~2 | 0 | |
| PA3 | Accensione del display | 0~7 | 0 | |
| PA4 | Kp.anello corrente | 0~1000 | 200 | Vietato modificare |
| PA5 | Ki del circuito corrente | 0~1000 | 300 | Vietato modificare |
| PA6 | Posizione Loop Kp | 0~1000 | 300 | |
| PA7 | Impostazione micro passi | 400~60000 | 4000 | |
| PA8 | Risoluzione dell'encoder(1000) | 4000 | Vietato modificare | |
| PA9 | Risoluzione dell'encoder(1000) | 40~30000 | 1000 | |
| PA10 | Tenendo corrente | 10~100 | 40 | |
| PA11 | Corrente ad anello chiuso | 10~100 | 100 | |
| PA12 | Prenotazione | |||
| PA13 | Prenotazione | |||
| PA14 | Abilita livello | 0/1 | 0 | |
| PA15 | Livello di allarme | 0/1 | 0 | |
| PA16 | Selezione della modalità a impulsi | 0/1 | 0 | |
| PA17 | Bordo a impulsi | 0/1 | 0 | |
| PA18 | Direzione di rotazione del motore | 0/1 | 0 | |
| PA19 | Velocità JOG | 1~200 | 60 | |
| PA20 | Sezione modalità PEND | 0/1 | 0 | |
| PA21 | Livello PEND | 0/1 | 0 |
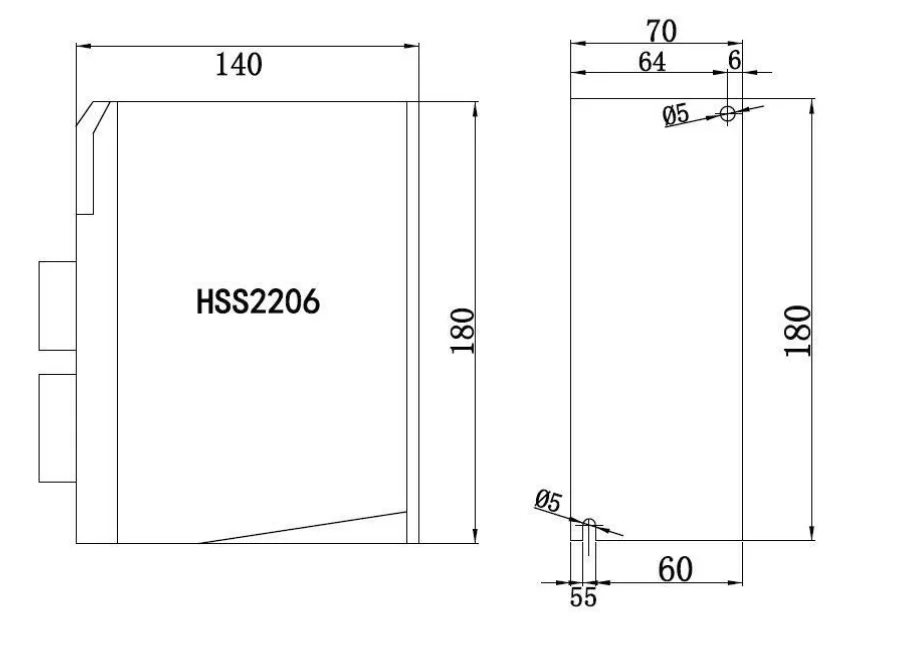
Dimensione del driver (mm):
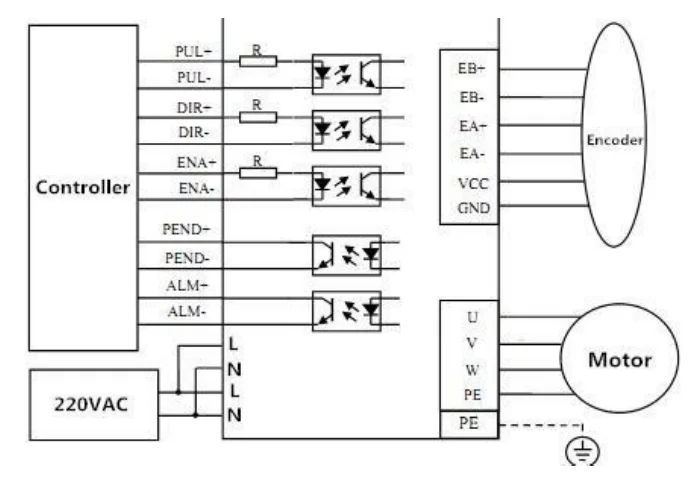
Schema elettrico:



,planetary gearbox,worm gearbox,reliable and durable,suitable for all kinds of motors, such as dc motors ,servo motors and stepper motor,to get bigger torque")
